
1. Gyűjtemény
Az alábbi oldalon rengeteg kidolgozott program található meg képként. Általában nem mellékelik hozzá a .rbt fájlokat.
NXT Code Snippets
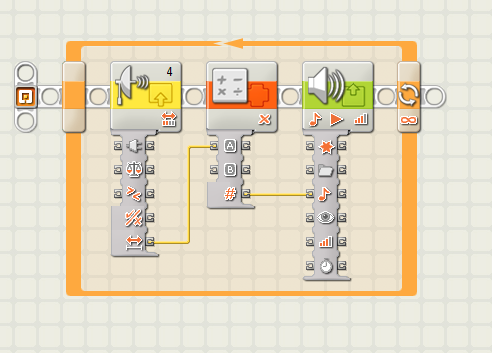
2. Ultrahangos-integetős zenélés
Az alábbi program aszerinti frekvencián játszik le hangot, amilyen távoli értéket az ultrahang szenzor mér.
A Math blokkban a mért értéket felszorozzuk 20-szal, hogy magasabb, és eltérőbb frekvenciákat adhassunk a lejátszónak.
Ezzel a programmal a robot előtt integetve lehet érdekes hangokat kiadni.
Szerző: Magyar Bence
Év: 2011.
A program kódja elérhető innen.
Szimulációs környezet
Az NXT robot a borsos ára mellett még nehezen beszerezhető is, ezért a fejlesztés során jól jöhet egy szimulációs környezet, ahol a robot megvásárlása nélkül tudjuk kipróbálni a kódjainkat, algoritmusainkat. Erre sajnos az NXT Mindstorms szoftvercsomagban nincs lehetőség, azonban a Microstoft Robotics Studio biztosítja számunkra a megfelelő környezetet.
A MSRS nagy előnye, hogy tetszőleges robotot megépíthetünk hozzá, és ennek megfelelően az elterjedt robotok már a rendelkezésünkre állnak. Hátránya, hogy az NXT-G-t nem támogatja, de ehelyett használhatjuk a VPL (Visual Programming Language) nyelvet a robot programozására, ami az NXT-G-hez hasonló adatfolyam-jellegű egyszerű nyelv, de a C#/XML nyelven írható manifestek segítségével tetszőlegesen bővíthető.
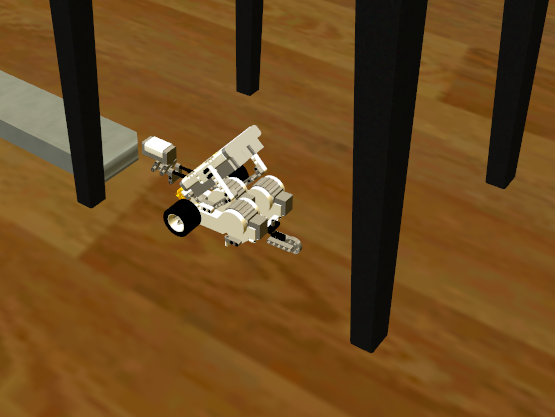
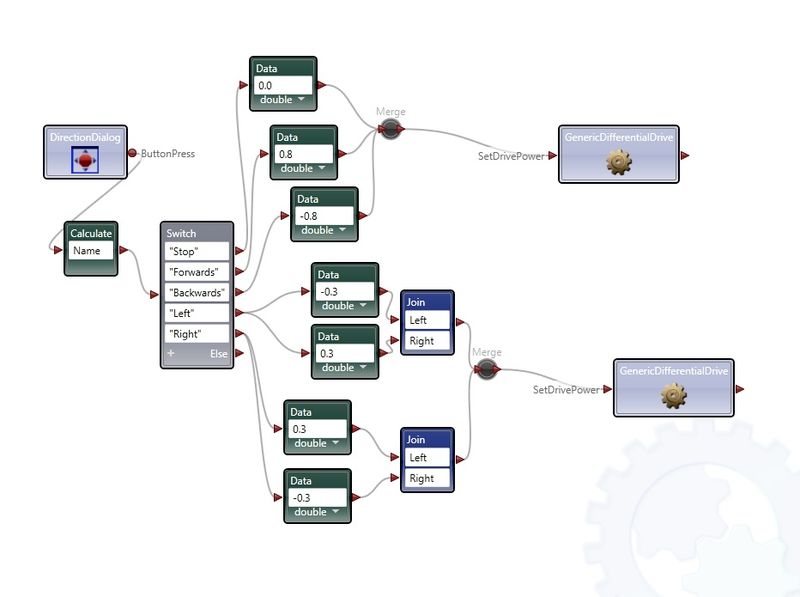
Drive-By-Wire Simulator
Az innen letölthető példaprogram egy távirányítóval vezérelhető NXT robotot működtet. A futtatás során egy kis kontroller segítségével jelezni tudjuk a robotnak, hogy melyik motort milyen irányban indítsa el.
Önműködő Tribot
A második példaprogram egy kicsit összetettebb robotvezérlést valósít meg, amiben megfigyelhetjük, hogy hogyan köthetjük be az egyes érzékelőket a szimulációs környezetben futó robotra. Ehhez érdemes a Manifest állományokat végigböngészni egyszer, az előre gyártott komponensek működése nagyjából egyértelmű.